1. Introdução
Neste artigo, explicaremos passo a passo como processar um conjunto de dados TV540 no LP360. A ideia do artigo é servir como um guia rápido para o usuário sobre o processamento. Este artigo não explicará em detalhes cada uma das configurações disponíveis em cada etapa, que podem ser encontradas na seção de ajuda ou no Guia do Usuário do LP360 Drone.
1.1. Pré-requisitos
Antes de começar com o fluxo de trabalho, o usuário precisará ter o LP360 v2024.2 ou mais recente e a extensão do sensor. A extensão do sensor será baixada automaticamente na primeira vez que o usuário tentar usar a ferramenta TV540 Data Copy ou importar um conjunto de dados TV540.
Use a ferramenta TV540 Data Copy para exportar dados brutos do sensor TV540 para o seu computador. Exporte os dados brutos seguindo os passos descritos no Fluxo de Trabalho de Processamento TrueView 3DIS ->TV540 Data Copy
Certifique-se de selecionar um diretório de trabalho antes de iniciar o fluxo de trabalho. Para fazer isso, vá para Configurações do Projeto ->Global ->Diretório de Trabalho do LP360 ->Selecione uma pasta no seu disco rígido local
O diretório de trabalho é uma pasta que o LP360 usará durante o processamento do TV540 para criar arquivos temporários que serão excluídos após a conclusão do processamento. Certifique-se de ter pelo menos 200GB de espaço no disco rígido da pasta selecionada. Também é recomendado selecionar a pasta no seu disco rígido local, pois trabalhar a partir de um disco rígido remoto ou servidor pode causar falhas/atrasos no processamento.
2. Importar
1- Abra o LP360 v2024.2.13 ou mais recente
2- Selecione "Importar Ciclo."
3- Selecione "TrueView / Microdrones"
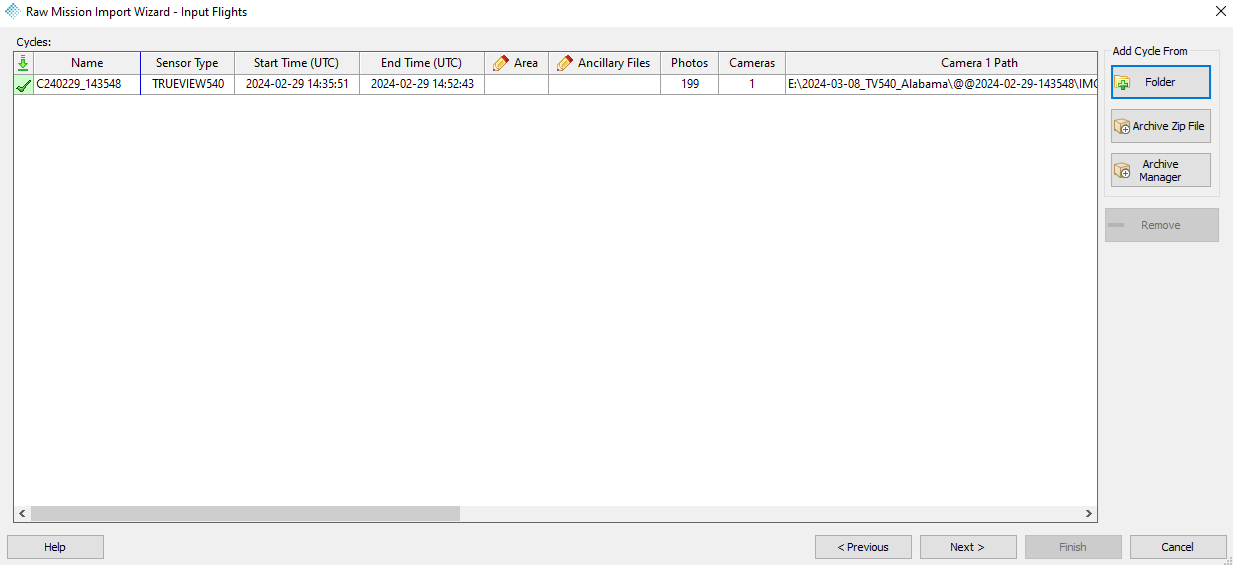
4- Pressione "Pasta" para importar os dados brutos do sensor. Você pode selecionar 1 ou mais ciclos (voos) para serem processados no mesmo projeto.
Nota: na primeira vez que você selecionar dados TV540, o software solicitará que você instale a extensão do sensor LP360.
Dica: Lembre-se de que os dados precisam ser baixados primeiro do sensor usando a ferramenta TV540 data copy.
5- Pressione Próximo
6- Selecione o arquivo da estação base no formato Rinex --> Próximo
7- Selecione a Pasta Raiz do Projeto e o Nome do Projeto
8- Selecione o Sistema de Referência (CRS) desejado
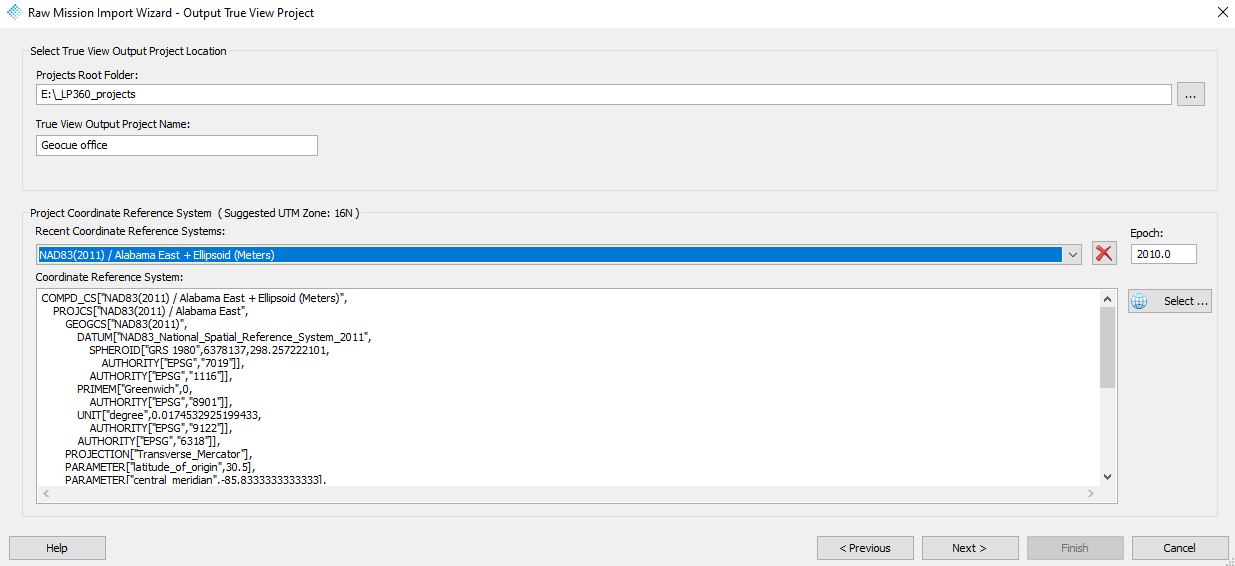
Dica: Se você não souber o CRS, você sempre pode selecionar WGS84 UTM zona XX em altura elipsoidal. O LP360 mostra a zona UTM recomendada.
9- Pressione Próximo --> O resumo será exibido --> Pressione próximo
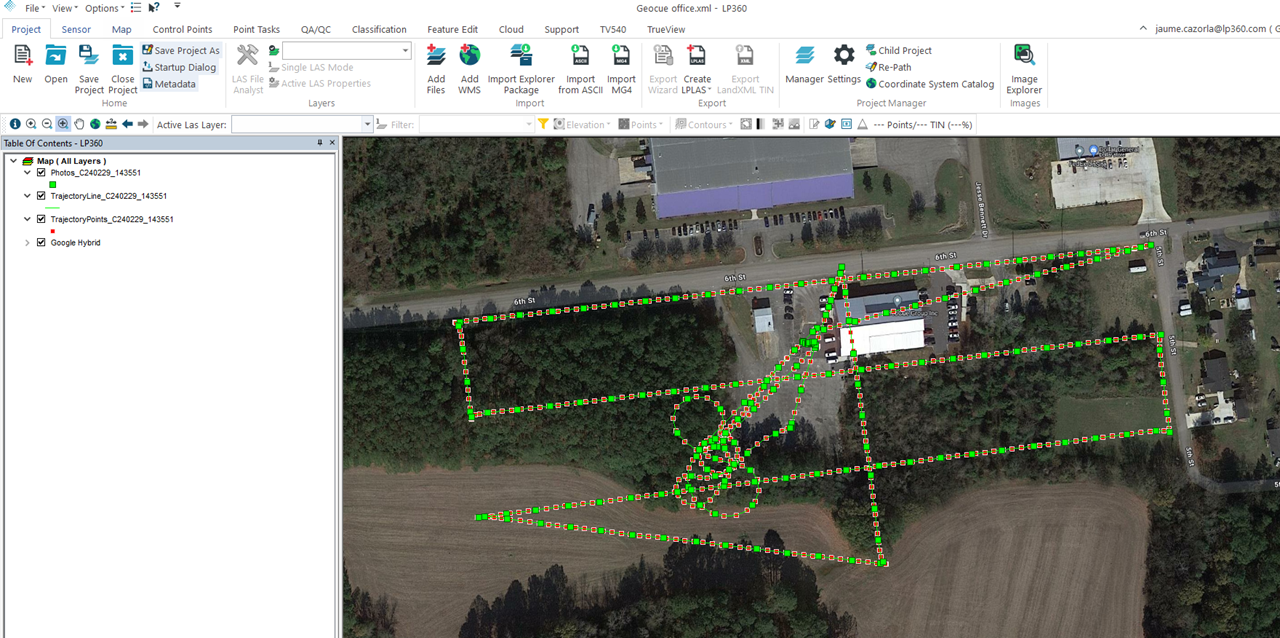
10- Dados importados
3. Geração de Nuvem de Pontos
3.1. Processamento de Trajetória
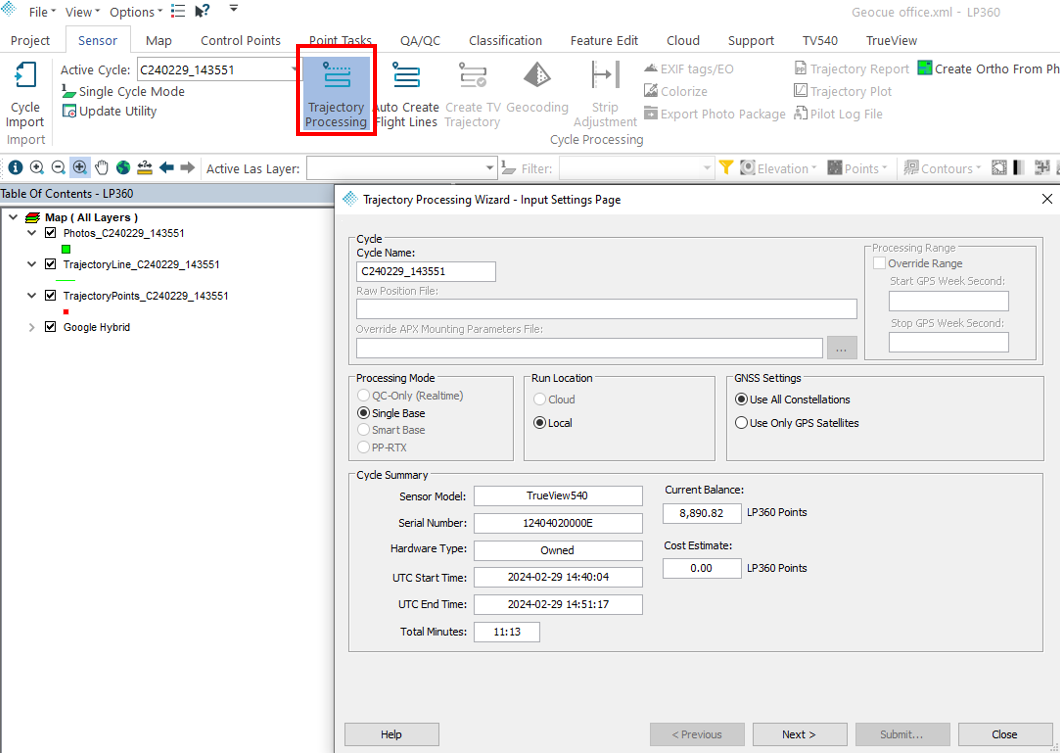
1- Vá para a aba "Sensor" --> Processamento de Trajetória --> Próximo
2- Na seção da estação base --> Pressione "Survey Nail" --> Pressione "Adicionar"
3- Adicione as coordenadas da estação base (latitude, longitude, altura em metros e datum) --> Pressione "OK" --> Pressione "OK"
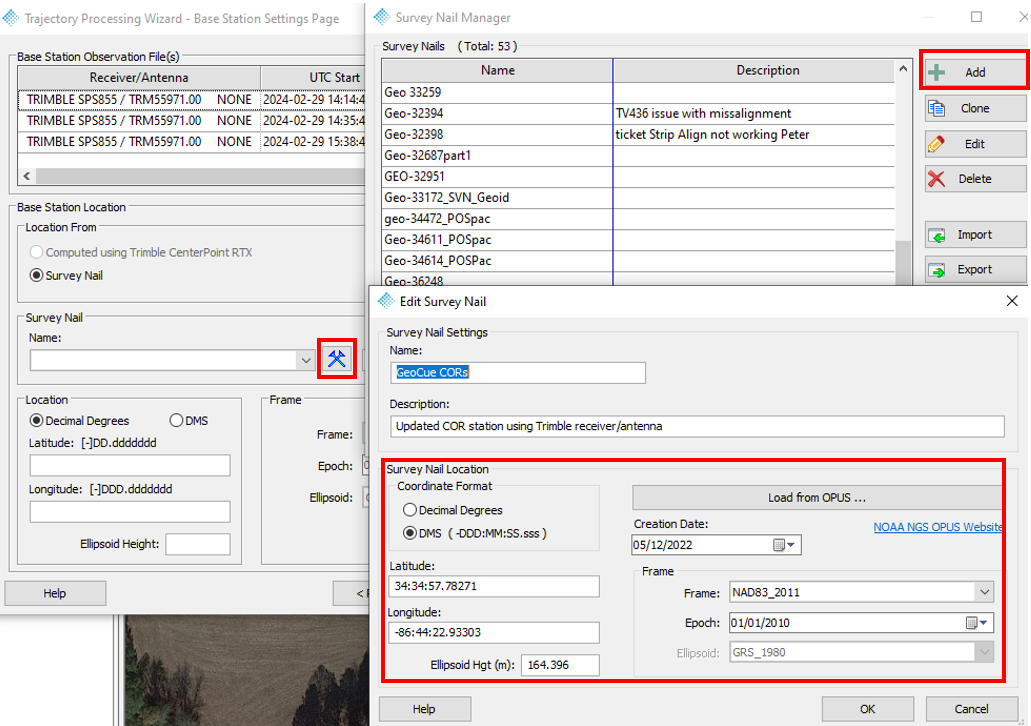
4- Revise a Altura da Antena e o Deslocamento APC (Antenna Phase Center Offset).
Dica: Se o "Deslocamento APC" estiver em vermelho, significa que o LP360 não conseguiu identificar o deslocamento da antena. Então, adicione manualmente o valor. Se você não souber o valor do deslocamento, pode obtê-lo em calibração de antena NOAA.
5- Pressione "Próximo"
6- Revise o resumo do Processamento de Trajetória --> Pressione "Enviar" --> Uma janela de confirmação aparecerá, pressione "Continuar"
7- Vá para "Gerenciador de Tarefas" para monitorar o status do processamento
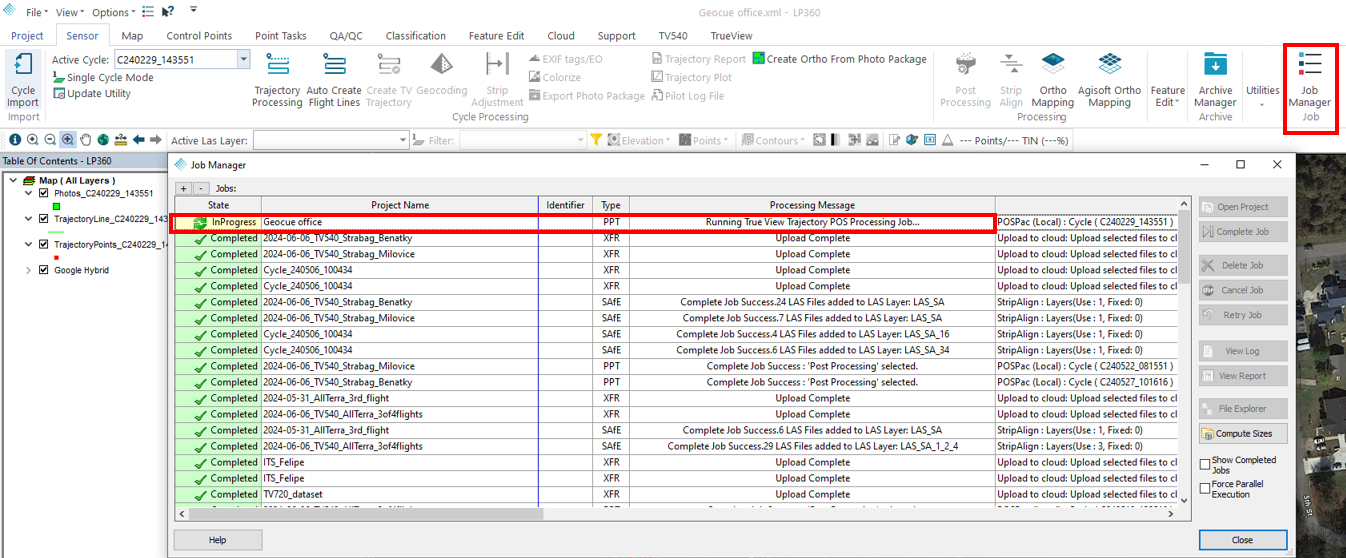
8- Uma vez que a tarefa for concluída, ela aparecerá como "Pronto" no "Gerenciador de Tarefas" --> Selecione-a --> Pressione "Concluir Tarefa"
3.2. Geração de Linhas de Voo
Uma vez que os dados são processados, o LP360 permite que você crie linhas de voo. Esta etapa envolve selecionar as porções dos dados que você precisa, excluindo segmentos desnecessários como decolagens e curvas, e garantindo que você trabalhe apenas com os dados mais relevantes.
- Selecione a ferramenta Auto-Create Flight Lines na aba Sensor para abrir o diálogo Auto Create Flight Lines.
- Camada de Linha de Voo - O nome da camada que será criada e não requer entrada do usuário.
- Comprimento Mín. – Nenhum conjunto linear de pontos mais curto que este valor será considerado para o cálculo de uma linha de voo. Este número geralmente deve ser definido para o comprimento da linha de voo mais curta. Use a ferramenta Medir na barra de ferramentas principal do LP360 para medir a linha de voo mais curta desejada.
- Raio de Curva – O raio, em unidades de mapa, permitido nas curvas. Quanto menor o número, mais próximas as linhas de voo serão cortadas nas curvas. Quanto maior o raio, maior a lacuna.
- Desvio Máximo – O parâmetro de desvio que informa ao software quando dividir um segmento de linha em dois. Quanto menor este número, mais lineares serão as linhas de voo, mas mais linhas de voo serão criadas. Quanto maior este valor, mais "curvatura" será permitida em um segmento relativamente reto sem divisão. Portanto, aumente significativamente este valor se você tiver linhas de voo curvas.
- Depois de inserir os parâmetros desejados, selecione Compute Flight Lines. O número de linhas de voo criadas será então preenchido na coluna Flight Lines e o Status mudará para Computed. Uma vez satisfeito, clique em Next.
- Na página Edit Mode do diálogo Auto Create Flight Lines, a ferramenta Select/Edit Features será automaticamente ativada.
- Selecione as linhas de voo que deseja excluir, depois clique na tecla Delete e em seguida na tecla Enter no seu teclado.
- Mantenha o controle pressionado enquanto seleciona para selecionar várias linhas de voo. Ou arraste para selecionar várias linhas de voo.
- Após editar as linhas de voo, o Status mudará para Edited para indicar que uma alteração foi feita. Quaisquer edições feitas no Edit Mode serão automaticamente salvas.
- Selecione as linhas de voo que deseja excluir, depois clique na tecla Delete e em seguida na tecla Enter no seu teclado.
- A camada de linha de voo deve ser criada, e as linhas de voo exibidas em azul na visualização do mapa.
- Os resultados podem ser alterados mudando os parâmetros e selecionando Compute Flight Lines novamente. As linhas existentes serão substituídas pelos resultados das novas configurações.
3.3. Processamento Pós-Ponto de Nuvem
1- Vá para a faixa Sensor --> ferramenta Post Processing
2- Selecione o Ângulo de Recorte
Dica: o ângulo de recorte é 50% do FOV, se selecionarmos um ângulo de recorte de 37 graus significa um FOV de 74 graus. O FOV máximo do LiDAR TV540 é de 75 graus. Recomendo usar o FOV máximo com o TV540.
3- Selecione o Alcance de Recorte
Dica: Se você quiser gerar todos os pontos sem filtro, desmarque "Ângulo de Recorte" e "Alcance de Recorte".
4- Execute o Pós Processamento.
O processamento pós gerará a nuvem de pontos dividida por linhas de voo.
4. Alinhamento de Faixa
O próximo passo será verificar o alinhamento das linhas de voo e corrigi-lo. Para isso, devemos realizar perfis (profiles) nas áreas de sobreposição entre as linhas de voo. Recomenda-se realizar essas seções em áreas planas, edifícios são especialmente úteis para isso.
Também podemos usar ferramentas como "Surface Precision" para verificar o alinhamento ao longo do voo ou entre vários voos. Depois de verificar o alinhamento, prosseguimos para corrigi-lo.
A ferramenta Strip Align requer o complemento de licença "Strip Align"
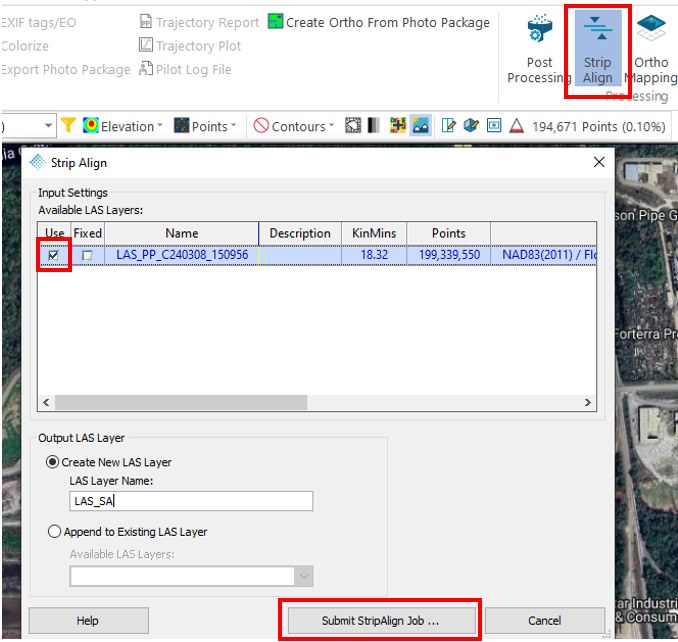
1- Vá para a faixa de opções Sensor --> Strip Align
2- Selecione o LAS para alinhar.
Dica: Você pode selecionar vários voos. Se fizer isso, a ferramenta corrigirá qualquer desalinhamento entre os voos. No entanto, se um voo tiver um erro significativo, ele introduzirá erro na nova camada Strip Align.
3- Pressione "Submit Strip Align job"
4- Vá para "Gerenciador de trabalhos" --> Verifique o status do processamento
5- Assim que o Strip Align terminar, o status mudará para "Pronto" --> Selecione o trabalho--> Clique em "Concluir trabalho"

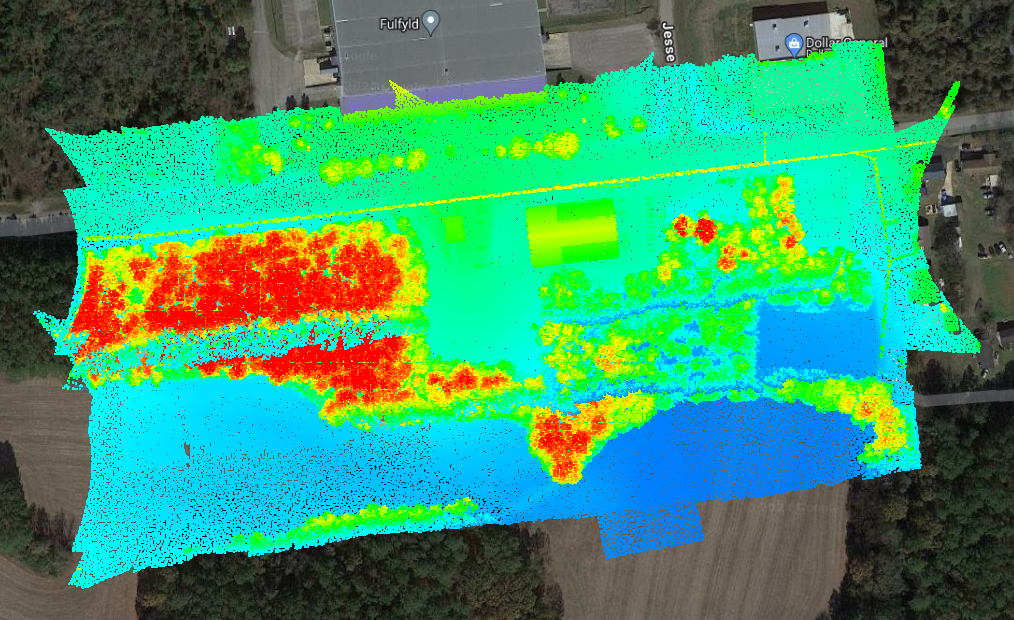
O Strip Align criará um novo LAS, no meu caso é chamado de "LAS_SA". Este novo LAS tem todos os desalinhamentos corrigidos. Exemplo:
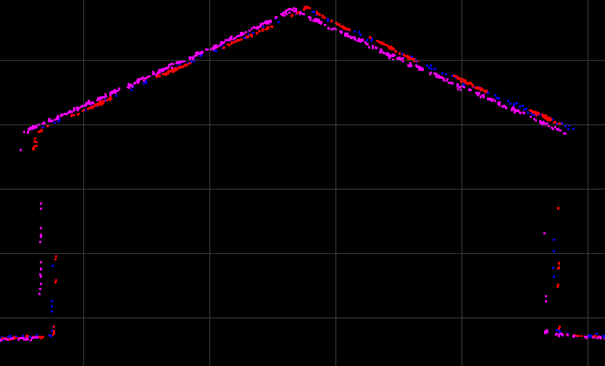
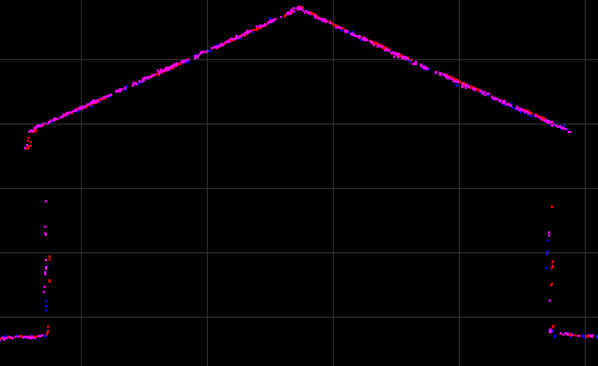
Após esta etapa, recomendamos continuar com o fluxo de trabalho recomendado pelo True View. Algumas das etapas recomendadas são "Suavização", "Pontos de Controle", "Remoção de Outliers" ou "Classificação do Solo".
Comentários
0 comentário
Por favor, entre para comentar.