A Classificação do Solo com LP360 Drone é um dos fluxos de trabalho mais comuns do software e é necessária para que vários outros PCTs funcionem, como Segmentação de Árvores e Extração de Edifícios para conjuntos de dados densos. Para um tutorial em vídeo geral do fluxo de trabalho de Classificação do Solo do LP360, consulte a página Como Realizar a Classificação do Solo no LP360. Se você estiver utilizando o LP360 Cloud para sua classificação do solo, consulte a página Como usar a Classificação do Solo do LP360 Cloud para orientação.
A visão geral do fluxo de trabalho de classificação do solo inclui:
- Gerar uma superfície de Semente (Seed Surface)
- Iterações Adaptativas do Solo (TIN Adaptive)
- Limpeza do Solo
- Afinamento/decimação do Solo
Gerando uma Superfície de Semente (Seed Surface)
O primeiro passo no fluxo de trabalho de classificação do solo é gerar uma superfície de semente, denominada originalmente de "Seed Surface". Esta é uma superfície preliminar que fornece uma aproximação inicial do solo.
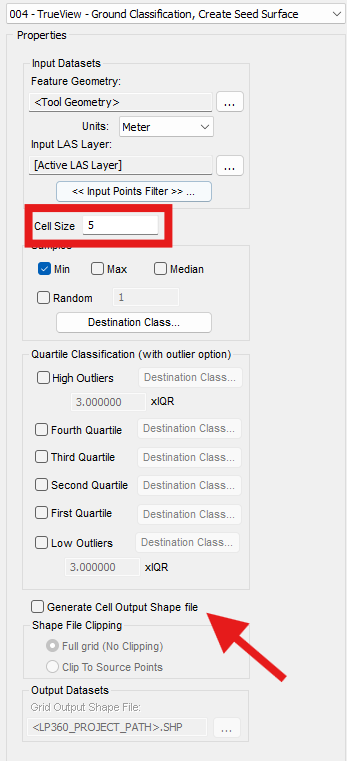
Criar uma superfície de semente é feito através de uma tarefa de nuvem de pontos Classificar por Estatísticas no LP360. O usuário irá inserir um tamanho de célula desejado e que tipo de amostragem classificar.
No caso da classificação do solo, queremos selecionar a amostragem mínima (min) pois podemos assumir que o ponto mais baixo em uma determinada célula será o solo verdadeiro. Nosso filtro de pontos de entrada deve incluir as classes 0 e 1, criadas nunca classificadas e não classificadas, pois normalmente não fizemos nenhuma classificação prévia. Como estamos procurando pontos LiDAR no solo, queremos que todos os nossos pontos de entrada sejam definidos para retornos únicos/últimos.
Em termos gerais, quanto menor o tamanho da célula, mais precisa será a superfície de semente. Mas pode exigir mais limpeza manual antes de gerar sua superfície de solo completa.
A capacidade de gerar uma grade para o tamanho de célula especificado também está incluída, certifique-se de selecionar um local de saída para o arquivo de forma gerado.
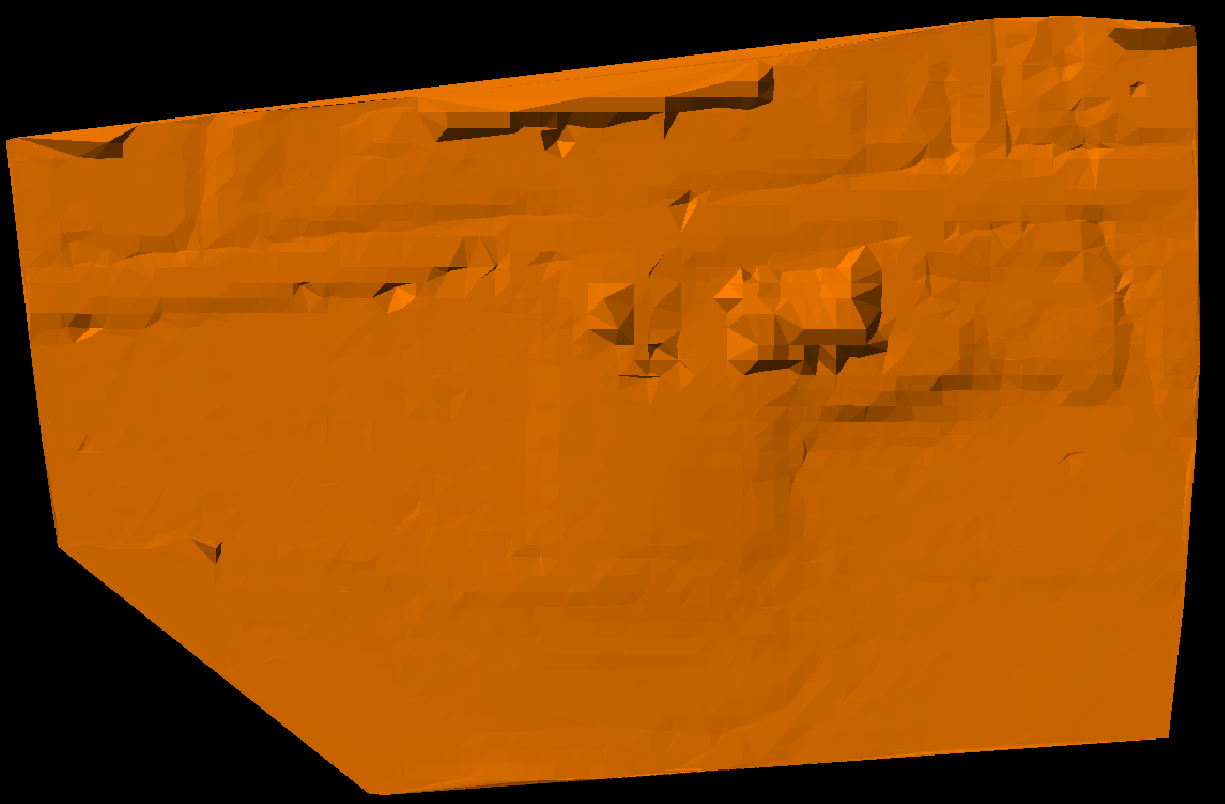
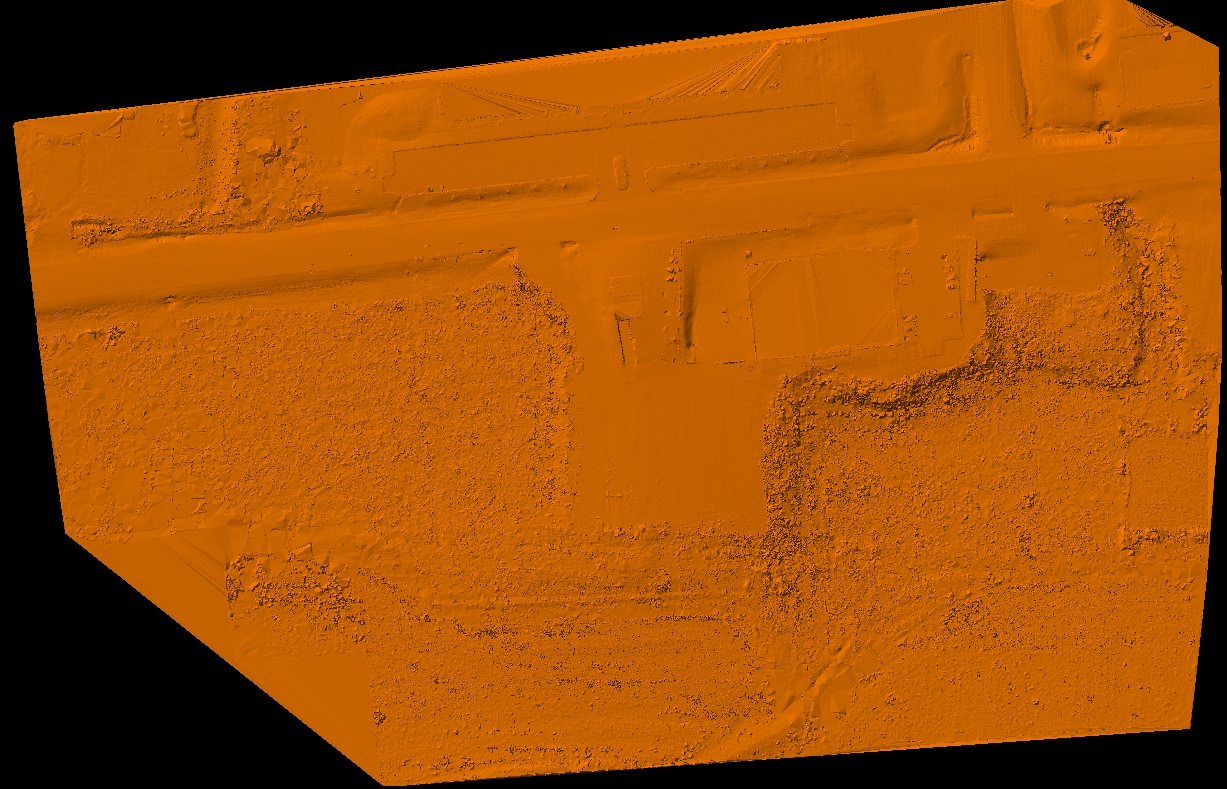
Embora esta superfície do solo não seja de má qualidade, ainda inclui alguns poucos pontos de ruído/fora do lugar, juntamente com um edifício muito óbvio. Para este exemplo, veremos uma mistura de parâmetros automáticos com PCTs e algumas opções de limpeza manual.
Macro de Filtro de Pontos Baixos/Isolados
Para ajudar na limpeza de nossa superfície de semente, utilizamos um macro executando um PCT de Pontos Baixos/Isolados com dois conjuntos de parâmetros. Os PCTs descritos abaixo são parâmetros de propósito geral e encorajamos a experimentação para a variedade de terrenos que os usuários podem encontrar.
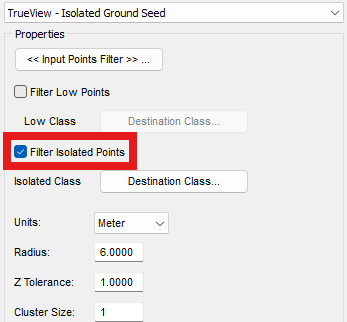
Aqui está o primeiro de dois PCTs de Filtro de Pontos Isolados que serão executados no Macro.
Certifique-se de definir o filtro de pontos de entrada para apenas Classe 2 - Solo.
A classe de destino será definida para Classe 10 - Trilho. Ou outra classe que será mantida fora do caminho com processamento adicional a jusante.
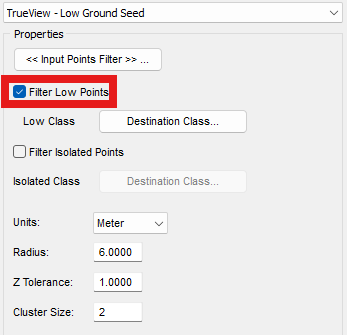
Este PCT usará o Filtro de Pontos Baixos em vez dos pontos isolados.
A principal diferença aqui é o tamanho do cluster que a ferramenta usará. A classe de destino também mudará para Classe - Baixo Ruído
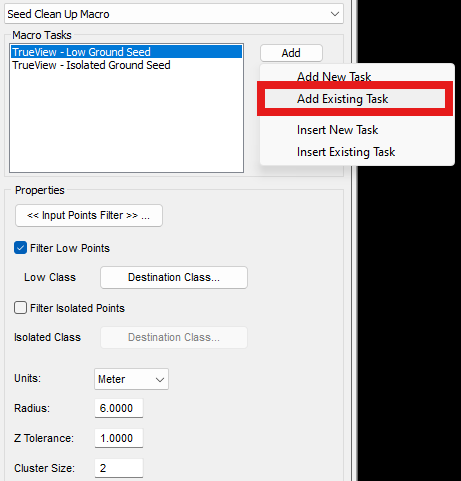
Em alguns casos, podemos querer executar ambos esses PCTs (ou mais) em uma única instância. Para fazer isso, poderíamos criar um novo Tipo de Tarefa PCT: Macro. Macros podem executar várias tarefas em conjunto umas com as outras com uma única execução do PCT.
Essas duas tarefas podem ser adicionadas a um Macro via "Adicionar Tarefa Existente"
E então executadas via a Execução PCT "Por Camada Ativa".
Limpeza Manual da Superfície de Semente
Embora os parâmetros automatizados realizem a maior parte do trabalho de limpeza da superfície de semente do solo, pode haver necessidade de alguma limpeza manual dependendo do tamanho dos edifícios em relação ao tamanho da célula, ou estruturas maiores no projeto.
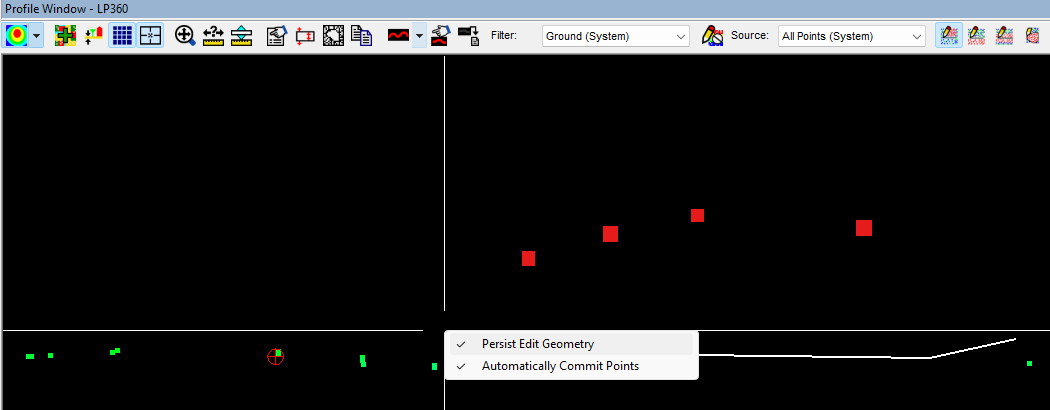
Classificar por ferramenta de Linha ou Pincel na Visualização de Perfil. Nota: Ctrl+R-Click ativará Editar Persistente/Auto Commit Points e reduzirá o esforço de limpeza de edifícios.
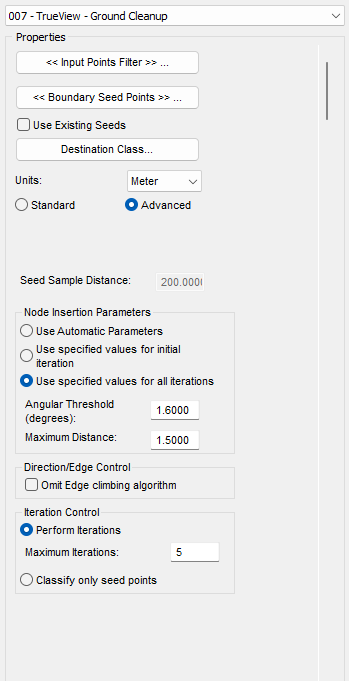
Realizar Iterações de Classificação do Solo (TIN Adaptive)
Uma vez criada uma superfície de semente do solo limpa, podemos realizar uma classificação de Iteração TIN Adaptativa para gerar nossa superfície de solo completa.
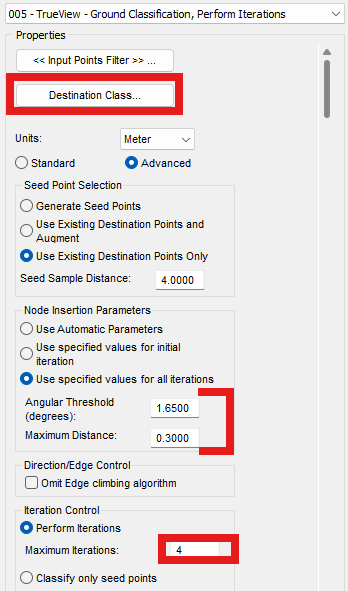
Esta ferramenta é um tipo de tarefa de Filtro de Solo TIN Adaptativo que irá "crescer" e classificar nossa superfície do solo com base nos pontos de semente que foram previamente classificados como solo.
Para a classe de destino, a classe 2 - solo com bandeiras de ponto-chave deve ser definida. Isso nos permitirá desfazer mais facilmente nossa classificação se os parâmetros precisarem ser modificados.
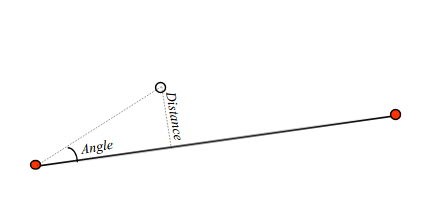
Limiar Angular e Distância Máxima são os dois principais parâmetros. Estes irão visualizar um ponto de solo, considerar todos os pontos próximos que se enquadram nos parâmetros e classificar aqueles que atendem aos critérios definidos. Este processo é então repetido com os pontos recém-classificados. Os valores especificados aqui funcionam bem para terrenos principalmente planos e abertos, com alguma variação entre encostas suaves e algumas valas.
Realizar iterações determinará quantas vezes os parâmetros são aplicados à ferramenta. Normalmente, recomenda-se de 3 a 5 iterações para terrenos principalmente planos com alguma variação, como valas ou encostas suaves. Além disso, começará a mostrar retornos decrescentes.
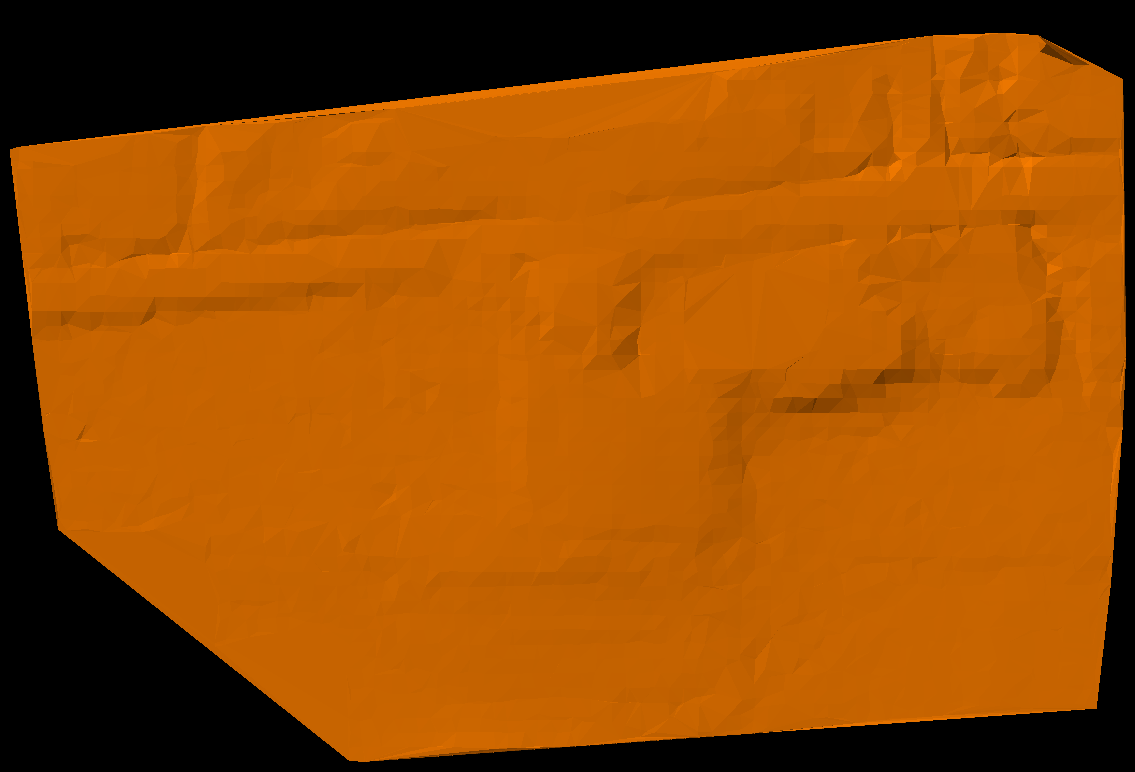
QC da Superfície do Solo
Após executar as Iterações de Solo PCT, é necessário realizar uma verificação completa de QA/QC nos pontos classificados para garantir que uma superfície do solo razoável e características indesejáveis não sejam incluídas.
Inspecionar ao longo de estruturas verticais ou terrenos mais íngremes são duas áreas que o algoritmo pode não detectar na primeira passagem. Dependendo do padrão do seu projeto, pode ser necessário reexecutar as iterações Adaptativas PCT.
Para áreas menores que o PCT pode não detectar, como a doca de carga acima localizada em nosso escritório, pode ser necessário um ajuste em menor escala.
Filtro de Limpeza do Solo
O Filtro de Limpeza do Solo PCT é usado para limpar áreas onde a classificação do solo deixou manchas não classificadas. Também pode ser usado para extração automática de solo em áreas localizadas. Isso é útil para a classificação automática de pilhas de materiais e pode ser encadeado em uma macro com o filtro de altura a seguir para classificar transportadores sobre pilhas de materiais.
Nosso filtro de pontos de entrada deve ser configurado para Classes 0 e 1 por padrão.
Os Pontos de Semente de Limite devem ser configurados para Classe 2 - Solo.
A classe de destino também deve ser Solo, sem bandeiras definidas.
Nossos parâmetros de inserção de nós devem ser configurados para um pouco mais alto do que nossa configuração para Iterações TIN Adaptativas.
Se o algoritmo de escalada de borda foi dispensado anteriormente, habilitá-lo geralmente oferece melhores resultados para o filtro de limpeza.
Realizar mais uma iteração do que a usada para a superfície do solo pode melhorar os resultados.
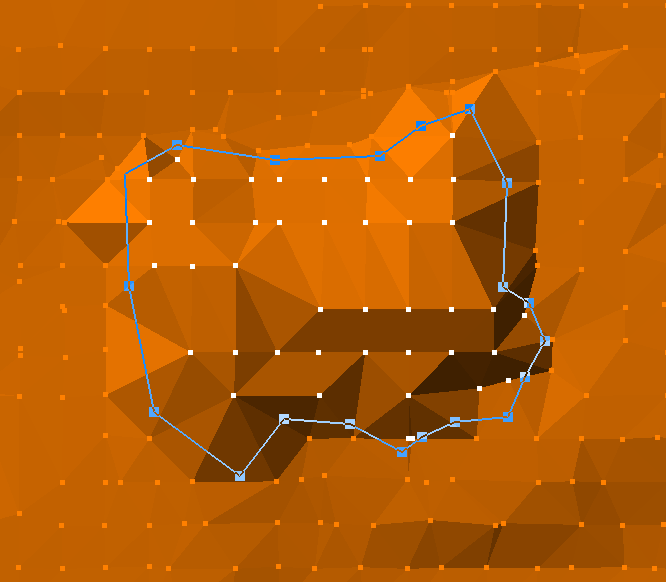
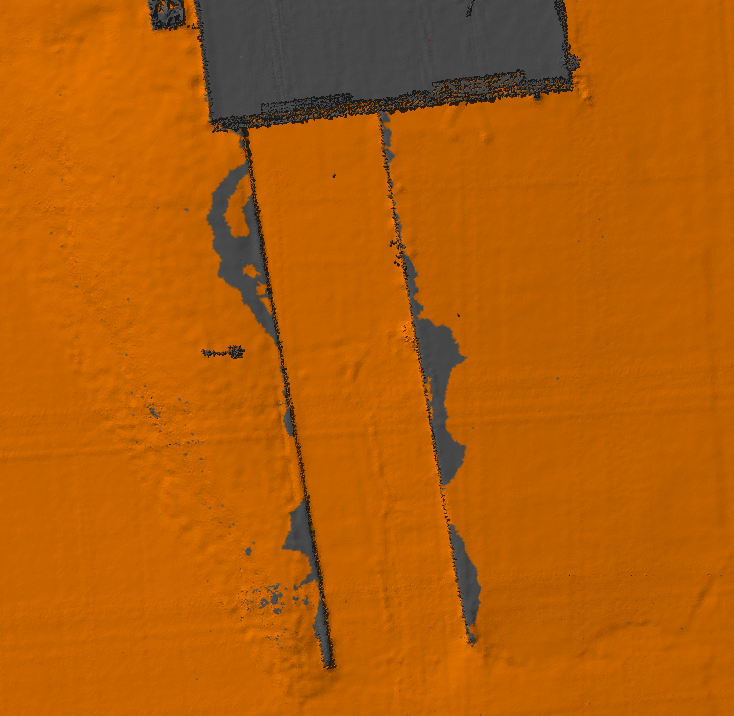
A execução deste PCT só pode ser feita via execução de PCT "Por Polígono". Isso permite um controle mais preciso sobre qual área será afetada. Para fazer isso, clique e desenhe um polígono ao redor da sua área, cada clique criará um vértice, e um duplo clique confirmará a forma para o PCT.
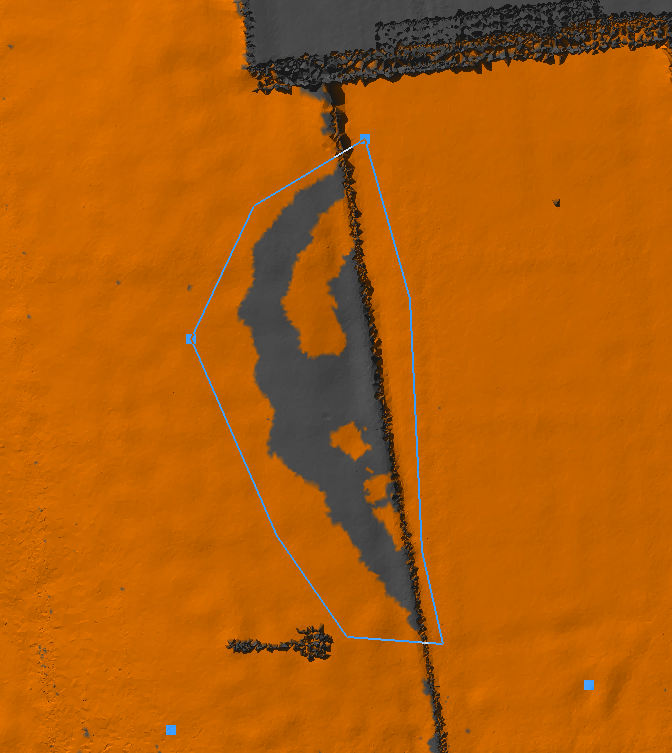
Em seguida, coloque pontos de semente esparsamente clicando em áreas cinzas não classificadas que você sabe serem solo. Um duplo clique no último ponto executará a tarefa e classificará mais solo, refinando sua superfície.

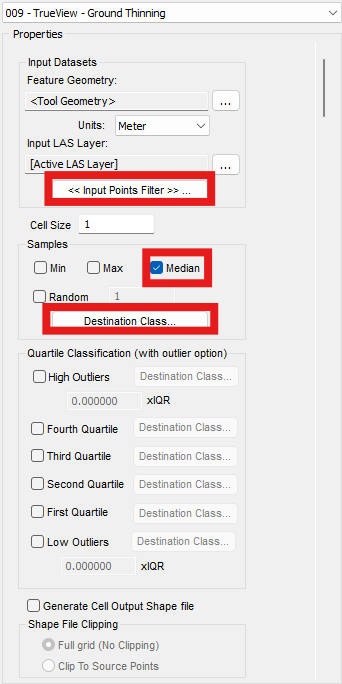
Redução de Pontos
Dependendo do processamento subsequente necessário para o seu projeto, pode ser necessário exportar para outro software, como Civil3D ou AutoCAD. Alguns deles podem ter dificuldades com milhões de pontos em um conjunto de dados, então a atenuação pode ser necessária para processamento em outro software que possa lidar com um máximo de ~40.000 pontos.
Isso pode ser feito por uma variante da nossa ferramenta classificar por estatísticas que usamos anteriormente para criar nossa superfície de semente de solo. Os parâmetros gerais são praticamente os mesmos, com a diferença chave sendo os pontos de origem e o tipo de amostragem.
Esta ferramenta é configurada quase idêntica aos nossos pontos de semente de solo, pois é o mesmo tipo de tarefa "Classificar por Estatísticas".
Nosso Filtro de Pontos de Entrada será configurado para Pontos Chave do Solo para evitar reclassificar nossos pontos de semente.
O tamanho da célula determinará o tamanho da grade que o solo atenuado representará. Assim como a quantidade de pontos classificados. Quanto menor o tamanho da célula, mais pontos classificados. Quanto maior, menos pontos classificados.
Ex.: Tamanho de célula de 1 classificará uma superfície de solo de 1m, tamanho de célula de 5 classificará uma superfície de solo de 5m.
A classe de destino deve ser configurada para uma classificação que esteja fora do caminho, mas em algum lugar que o usuário possa referenciar rapidamente. Neste caso, temos o destino configurado para Classe 23 - reservada. Criar um filtro para a classe de solo atenuado também pode ser útil.
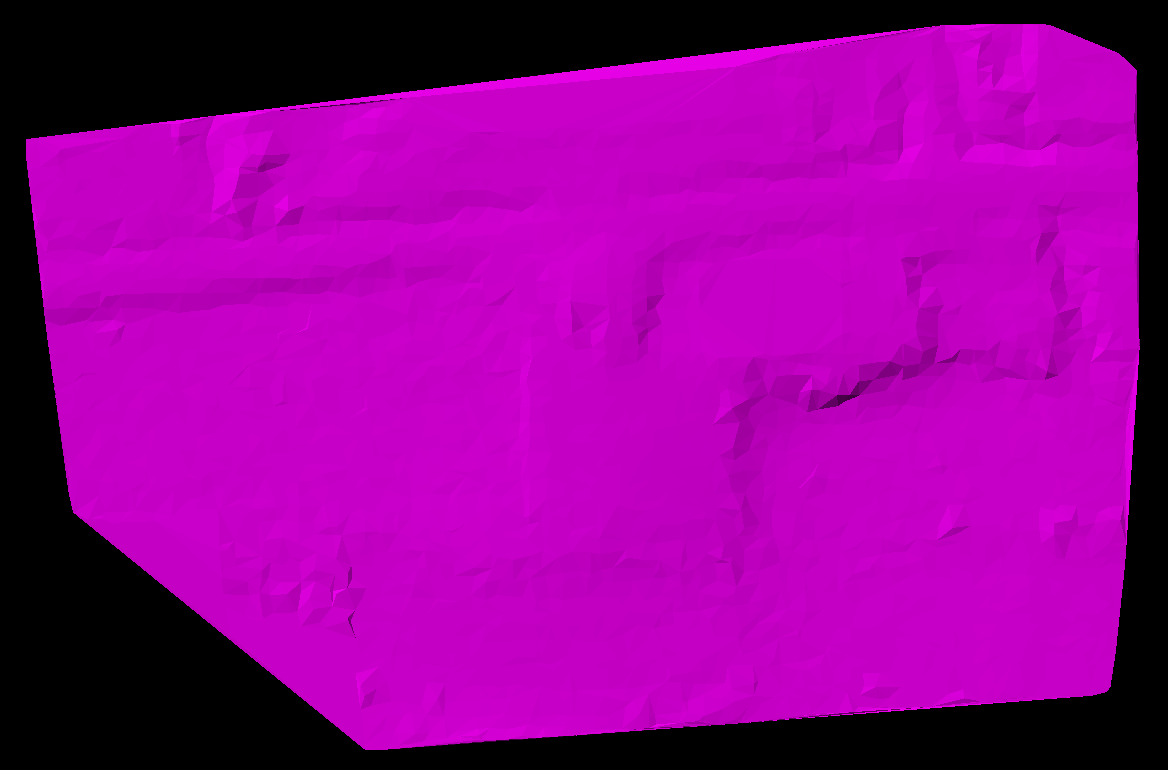
Os pouco mais de três mil pontos classificados para uma grade de 5m são muito mais razoáveis do que as dezenas de milhões de pontos de solo classificados para software CAD. Para exportar essa superfície, mais informações podem ser encontradas em nosso artigo Guia do Assistente de Exportação.
Comentários
0 comentário
Por favor, entre para comentar.