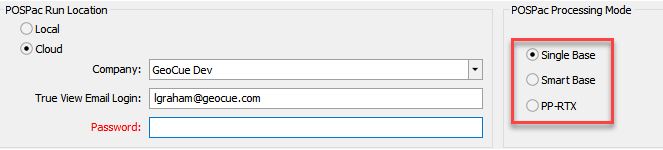
In LP360 Drone, formerly TrueView EVO, the user has a number of options for post-processing the trajectory solution for a TrueView 3DIS. Applanix PP-RTX is one method that requires no local base station, is independent of CORS networks, and produces centimeter level accuracy globally.
What is Real-Time EXtended (RTX) & Post-processed RTX (PP-RTX)?
In the middle of 2011 Trimble introduced the CenterPoint RTX real-time positioning service providing centimeter accurate positions for global real-time applications. The corrections containing real-time precise orbit, clock and other information are transmitted to the rover via satellite or Internet. The error sources such as satellite orbit, satellite clock, atmospheric delays are modeled at the rover location. The advanced software algorithms running on the rover receiver and satellite motion allow the position to quickly converge to an integer carrier phase solution. All broadcasted corrections are derived from global network of Trimble base stations. Using the precise data derived from the real-time CenterPoint RTX system, a new high-accuracy post-processed RTX-Aided inertial processing method has been developed for POSPac MMS, enabling robust, cm level positioning to be achieved for mobile mapping without reference stations. See the technical note from Applanix for more detail.
What is PP-RTX2?
The IN-Fusion+ PP-RTX 2 processing mode in the next generation of POSPac post-processing SW (Introduced in v9). This new processing mode will be an addition to the current IN-Fusion PP-RTX mode (Applanix PP-RTXⓇ) in POSPac and targets the uncrewed airborne (UAV) market with equipped APX boards. In order to benefit from this new processing mode, it is essential that the additional signals and frequencies from all GNSS Satellite Navigation Systems are logged. All boards
delivered since spring 2022 should already have this enabled unless actively changed.
The IN-Fusion processing modes have improved robustness and reliability over IN-Fusion PP-RTX. It has improved quality and accuracy in GNSS-challenged environments such as urban and foliage areas (e.g. up to 100% improvement possible). Convergence time for PP-RTX 2 processing is faster, especially in the Global Regions for short UAV trajectories.
PP-RTX Specifications
| PP-RTX | IN-Fusion+ PP-RTX 2 | |
| Availability | 1h after Mission | 1h after Mission |
| Horizontal Accuracy | <3cm | 3-15cm |
| Vertical Accuracy | <6cm | 3-15cm |
| Mission Duration |
Standard RTX: 30 min for full accuracy Fast RTX: 10 min |
Minimum of 10 - 15 minutes rover data globally. |
| Convergence Time |
15-20 minutes |
<3 minutes |
Where are the Fast RTX regions?
Trimble has been updating the FAST RTX regions since the technical note was composed. The latest coverage can be found on the Trimble Global Coverage Maps.
True View Operational Considerations
In areas where Fast RTX is not available, PP-RTX will not be a viable post-processing option if your drone does not allow for longer than 20 minute flights or you did not collect enough static data on either side of your flight to give you a rover file over 20 minutes in length. Use the Trimble GNSS Augmentation Planner (TGAP) to see the best post-processing suggestion.
Comments
0 comments
Please sign in to leave a comment.