Requires an LP360 Geospatial Advanced, LP360 Drone, LP360 Land Standard, or an LP360 BIT add-on license.
The Outliers Auto Classifier on the Classification tab of the ribbon should be used whenever the presence of gross outliers has been identified in the input point cloud during the input data verification. It can also be activated on a noisy point cloud because some outliers located close to the point cloud might not be close enough to their surrounding points to be considered as points affected only by random errors. When the Outliers Classifier detects that a point is abnormally isolated from the rest of the points.

Figure 2: Outliers Auto Classifier dialog
Input
Available LAS Layers
The source LAS that will be considered.
Input Points Filter
This option allows the user to filter the desired points to be considered as input. By default, all points are selected.
Settings
Filters
Morphological
This outlier rejection method is an original method, developed by GeoCue. It is based on the combination of morphological and density-based indicators. The morphological indicators aim at identifying the structures inside the point cloud and score the points according to their belonging to one of the structures described by their surrounding points. The density-based ones aim at identifying isolated points, with a surrounding density abnormally low compared to one of their nearest neighbors. The combination of these indicators results in a single score, corresponding to the probability for a point to be an outlier.
Isolation
This outlier rejection method is a simple, yet efficient method of rejecting isolated points. It should be used only when a dataset contains a lot of gross outliers, and not a lot of sparsely described elements in the point cloud (trees, powerlines, pole). How it works is very simple: every point with less than a given number of points within the Search Radius is considered isolated. The required number of neighbors is set using the Cluster Size.
Recommended to use the Morphological one because it is a complex outlier detection filter, able to distinguish true outliers from locally isolated points. The results provided by this filter are always superior to the ones obtained by the Isolation filter, when the parameters are configured properly. If the user does not wish to perform a deep and precise outlier rejection on the point cloud, the Isolation filter can be used to remove the gross outliers, which are located far from the rest of the point cloud.
Recommended value for TrueView 3DIS: Morphological.
Input LAS Parameters
Cluster Size
This parameter appears only when the Isolation filter is selected. It corresponds to the minimum number of points should have in its spherical neighborhood to be considered as an inlier.
Consequently, reducing the value of these parameters increases the tolerance of the filter (fewer points are removed) as the number of points to have to be considered as inlier is reduced.
In practice, the user should ensure that the points located in low density areas have a sufficient number of neighbors to be kept by this filter. Set the value according to the observed number of neighbors required to preserve inliers in low density areas. The default value is an indication, but adjustments might be necessary for a majority of processing.
Recommended value for TrueView 3DIS: from 1 to 2.
Search Radius
For the Isolation filter, this parameter defines the neighborhood considered by the algorithm. With a Cluster Size set to five and Search Radius set to 0.5, every point with less than 4 neighbors within a 0.5m radius will be flagged as an outlier. The search radius is not used with the Morphological filter.
Note: The smaller the Search Radius value, the longer the tool will run.
Point Density
This parameter corresponds to the measured/computed average surface density of the point cloud (in points per Map Unit (MU)) and is used to set the number of neighbors considered during the estimation of the morphological and density-based indicators of the Morphological filter.
The value must be set according to an actual evaluation of the average density of the point cloud, or according to the expected density provided by the flight planning application. It does not need to be set very precisely, as the impact of this parameter over the final result of the outlier point rejection is not as important. The user should keep in mind that the required value increases with the point cloud density the value must be lowered for point clouds with a density above the expected one for a given system.
Note that these parameters also affect the tool’s capacity to identify clusters of outliers. Any cluster comprising more points than the number of required neighbors computed from the average point cloud density will not be identified as outlying, especially if it is located far from the rest of the point cloud because all the points of the cluster will be compared with other points of the cluster and not with inliers.
Recommended value for TrueView 3DIS: use the tool "Estimate Point Density" tool to automatically compute this value.
Classification
Classify Outliers
Enabling this option assigns outlier points to the selected Destination Class.
Recommended value for TrueView 3DIS: Check the option and select as destination class "7 Low Point (noise)".
Withheld Flag
Enabling this option will set the Withheld flag for outlier points.
Execute
Options for executing the tool on the input LAS Layer(s).
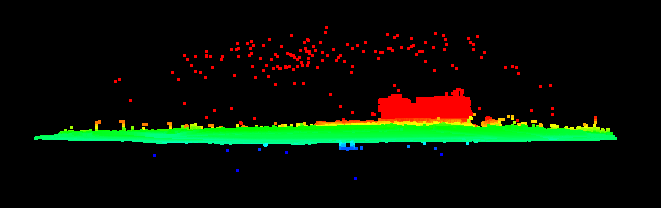
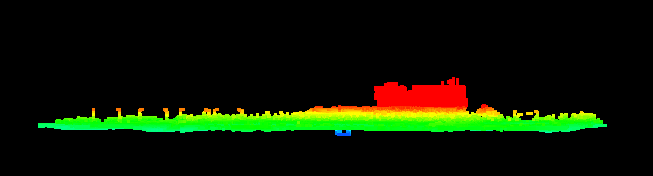
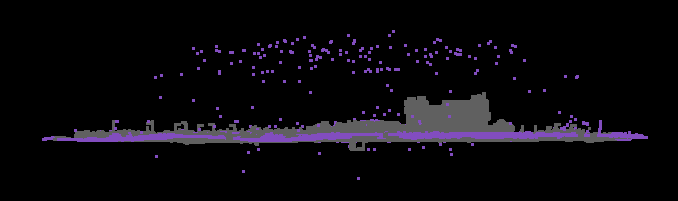
Example
Example of a point cloud before and after using the Outliers Auto Classifier.
TrueView Recommendations
Here are some recommendations for using the Outliers Auto Classifier in a TrueView 3DIS workflow:
- Use this tool after strip alignment.
- This tool helps with the feature extraction, for example removing low points before ground classification will help to avoid "holes to hell" (round areas without ground classification).
- For default TrueView:
- Morphological
- Classify Outliers --> 7 Low Point (noise)
- Point Density: automatic (estimate points density)
- For large TrueView projects:
- Isolation
- Classify Outliers --> 7 Low Point (noise)
- Cluster Size: 1
- Search Radius: 0.5m/1.5ft
- Point Density: automatic (estimate points density)
- Less time consuming than Morphological, but worse noise detection.
Comments
0 comments
Please sign in to leave a comment.